Hi y’all! 😆🤓🤖
I’m Aria and this is my digital portfolio. It will cover most of my experience, especially those relavent to Robotics, including past and ongoing research, projects, and internships.
Quick intro about myself. I’ve finished undergrad in Mechanical Engineering with a concentration in Robotics at Northwestern University. My passion lies at the intersection of Control Software, Robot Learning, and System Integration. My skills bridge both hardware and software domains. My focus at this point is on Safe Embodied AI, Robot Hand Manipulation, and Multi-agent Reinforcement Learning. Moving forward, I’m looking into opportunities in software and machine learning engineering in related fields.
Looking forward to connecting and sharing ideas!
Educations
 |
Northwestern University 2022.09 - 2025.06 B.S. with honors in Robotics/Mechanical Engineering, Magna Cum Laude, GPA: 3.947 |
 |
University of Illinois at Urbana Champaign 2020.08 - 2022.05 (transferred) B.S. in Mechanical Engineering, minor in Informatics, GPA: 4.0 |
Industries
 |
RoboForce - Member of Techinical Staff 2025.10 - Now | Milpitas, CA Building Physical AI-Powered Robo-Labor |
 |
Tesla - Energy R&D 2025.07 - 2025.10 (Resigned to join startup)| Palo Alto, CA Test Hardware Controls Engineer, Automation & software integration |
 |
Ginkgo Bioworks 2024.06 - 2024.09 | Emeryville, CA Mechatronics Engineer Intern, System & software integration for robot deployment |
|
Tesla - Power Electronics 2024.01 - 2024.05 | Fremont, CA Manufacturing Engineer Intern, Software automation for PCBA |
 |
Shirley Ryan Abilitylab 2023.06 - 2023.08 | Chicago, IL Research Engineer Intern, Robotic control for exoskeleton |
Skills
- 💻 Programming: Python, C/C++, Java, MATLAB/Simulink, SQL
- 🪄 Dev Tools: Git, Linux, ROS, Pytorch, TensorFlow, OpenCV, IssacGym, RoboDK, Tkinter, Docker
- 🔩 Hardware: CAD (SOLIDWORKS, Siemens NX, Fusion 360), CAM, microcontroller (Raspberry Pi, PIC 32, EPS 32, Arduino), rapid prototyping (3D printing, laser cutting), PCB design, PLC, communication protocols (UART, I2C, SPI, CAN, RS485, EtherCAT), machine shop, soldering, oscilloscope
Updates
- In Progress: ⌨️⌨️ Quiet Multi-agent System
Publications
SENTINEL: A Multi-Level Formal Framework for Safety Evaluation of LLM-based Embodied Agents
- Simon Z., Yao L., Philip W., Zinan W., Qineng W., Zhian R., Xiangyu S., Xinyu C., Frank Y., Kangrui W., Huajie S., Manling L., Qi Z
- Paper Link
- Submitted to ICLR
Inverse Delayed Reinforcement Learning
- Simon Sinong Zhan, Qingyuan Wu, Zhian Ruan, Frank Yang, Philip Wang, Yixuan Wang, Ruochen Jiao, Chao Huang, Qi Zhu
- Paper Link
- In Progress
Distributed Invariant Unscented Kalman Filter based on Inverse Covariance Intersection with Intermittent Measurements
- Zhian Ruan, Yizhi Zhou
- Paper Link
- Submitted to ACC
Projects
Robotic Dexirty Hand [C++, ROS2]
- Led software architecture on ARM Cortex-M7 within a cross-functional ME/EE/CS team, designing control systems for an 8-DOF robotic hand with wrist, power grasping finger, and dexterous finger for manipulation tasks
- Characterized serial elastic actuator (SEA) for force sensing and backdrivability across multiple loading conditions on all modules, achieving <0.05s force settling time and >10Hz bandwidth in position tracking
- Coordinating with eletrical team with motor driver board development integrating gate drivers, GaNFETs hall-effect sensors, and a 16-bit external ADC for current sense, achieving a more precise torque regulation
- Developed comprehensive brushless DC (BLDC) motion control libraries integrating forward/inverse kinematics with null space optimization algorithms, implementing inner loop with field-oriented control and PD torque control and outer loop PID position control and gravity compensation
- Architected inter-board (SPI & CAN) between 9 boards with sensors with Saleae logic analyzer for signal integrity verification, enabling 10kHz real-time feedback loops for encoders, current sensors, and motor drivers
- Created intuitive MediaPipe-based hand tracking graphical user interface with ROS2 integration, enabling real-time gesture recognition and visualization RViz with URDF-based digital twin implementation

Exploding Wild-Kitten Boardgame App [Java]
- Spearheaded implementation of test-driven development (TDD) for a Java-based multiplayer card game, creating comprehensive unit and integration tests that achieved 100% code coverage while applying boundary value analysis (BVA) techniques to identify and mitigate critical edge cases that could impact gameplay integrity
- Architected and deployed a robust CI/CD pipeline with strict branch protection rules that enforced automated quality checks, while establishing team-wide coding standards that improved maintainability and enabled successful internationalization (i18n) support across multiple languages
KUKA youBot Pick and Place [Python]
- Created a robotic manipulation simulation for KUKA youBot (4-wheeled omnidirectional mobile base + 5R arm), implementing trajectory generation using screw theory, SE(3) transformations, and Mecanum wheel kinematics
- Built PI feedback control system with pseudoinverse Jacobian for end-effector tracking, incorporating joint limit constraints and singularity handling for stable pick-and-place operations
- Designed modular codebase with configuration management and comprehensive error visualization, enabling autonomous manipulation tasks with error convergence across test scenarios
- View on GitHub
Vision Pro Simulator [Python, TensorFlow]
- Developed lightweight Vision Pro simulator with real-time hand gesture and motion recognition achieving >90% accuracy using custom MLP and LSTM neural networks, trained under 90 seconds on CPU
- Implemented interactive photo manipulation features including drag-and-drop, scaling, rotation, and drawing tools using computer vision techniques and bilinear interpolation
- Devised robust hand tracking system maintaining accuracy across varied lighting conditions and multi-user scenarios, with modular pipeline for detection, tracking, and gesture recognition
- View on GitHub
- See full video on YouTube
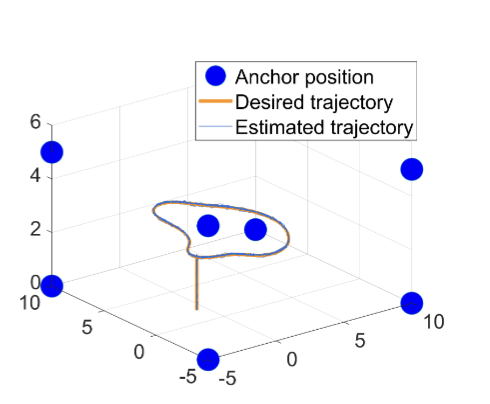
Invariant Unscented Kalman Filter for Distributed Robotic System [Matrix Lie Group, Multi-agent SLAM, Sensor Fusion]
- Proposed a target tracking algorithm for distributed time-variant system in 3D with invariant (using matrix Lie group and Lie algebra) UKF for distributed state estimation
- Applied Inverse Covariance Intersection sensor fusion algorithm as a consistent and less conservative method while handling unknown distributed covariance
- Performed 50 trials of Monte-Carlo simulation at different communication rate (including centralized system) and calculated position and orientation RMSE to show algorithm is robust to time-varying communication topology
Search Algorithm Visualization [C++]
- Created a visualization tool for search algorithm including A*, Dijkstra and BFS with different types of distance measurement (Euclidean, Manhattan, Chebyshev)
- View on GitHub
Planning and Control based on Vehicle Dynamics [C++]
- Implemented a Planning and Control algorithm based on vehicle dynamics to simulate and analyze vehicle behavior in complex driving scenarios such as overtaking, navigating crosswalks, and executing precise parking maneuvers
- View on GitHub
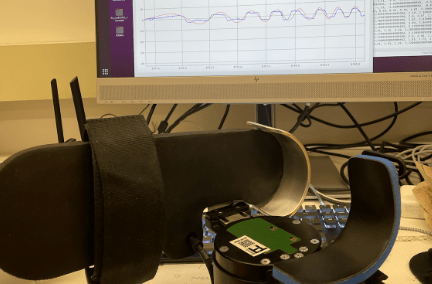
Lower Limb Exoskeleton Transparency Control [Python, ROS, Testing]
- Developed a test system for transparent haptics rendering on lower-limb exoskeleton using ROS Noetic
- Evaluated and validated parameters for PID and IIR filter by generating Bode plot and shift in RMSE in Python
- Achieved near zero output at human movement frequency with a less than 10ms delay in real-time
Line Following Robot [Embedded C++, PID]
- Devised a path following robot based on ATmega32U4 for at 4m/s in low lighting condition
- Tuned PID position controller based on IR sensors and PD speed controller based on encoder via trial-and-error, and attained an over 95% success rate
- Established UART communication with ESP32 as a Wi-Fi module to receive command from a higher-level controller, integrated a circuit consisting of a power source and LEDs for computer vision
2R Robot Impact Simulation [Lagragian Mechanics, Numerical Analysis, Python]
- Modeled a rigid body (with elastic impact) inside a box handled by a 2R robot as an end effector via Lagrangian mechanics and RK4, and implemented gravity compensation due to mass of the links and joints of the robot with optimal control
- View on GitHub
–>